When using the messages passing approach, communication is achieved by transmitting messages on a communication channel, which is a directional link between two processes, i.e. a logical abstraction of the physical medium. A communication from process p to q requires a unidirectional communication channel from p to q. A bidirectional communication channel, also denoted two-way, assume two communication channels: a first from p to q, and a second one from q to p.
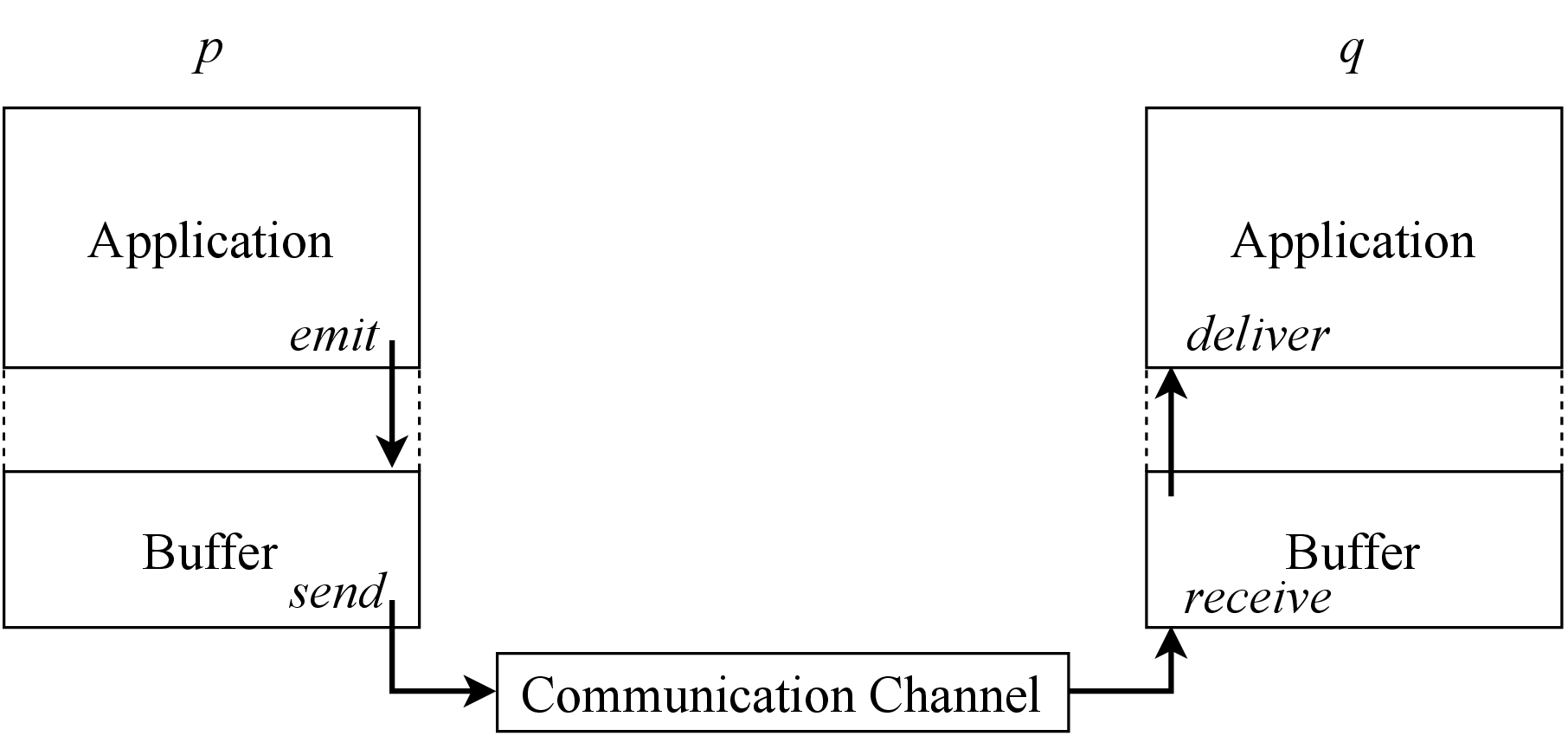
A process p sends a message m using the primitive emit at the application layer, which inserts m in its buffer. The buffer of process p sends the message m on the communication channel, which transmits m to the buffer of process q. The latter receives it and delivers it to the application layer of process q. Note that these buffers are typically offered by the operating system.
An example of communication from process p to process q is shown in 2.4.
In the literature, there exist several types of communication channels such as reliable, eventually reliable, fair-lossy, and unreliable [FJR06]. All of them assume the three following common properties.
Each type of communication channel offers different guarantees in terms of message loss.
The type of communication channel can also specify bounds for the reception of a message, such as the eventually timely channels or timely channels, or tolerate message loss without any bound, such as lossy asynchronous channels:
Note that in this thesis, there is no assumption on message ordering, and channels are not required to be FIFO. A FIFO channel stands for First-In First-Out (FIFO), where messages are received to the process by order they were sent.
The different types of communication channels explained previously are summarized in the following 2.3.
|
|
||
| Reliable |
|
||
| Eventually reliable |
|
||
| Fair-lossy |
|
||
| Unreliable/Lossy |
|
||
| Eventually timely |
|
||
| Timely | Eventually timely channel whose bounds holds from t = 0. | ||
| Lossy asynchronous |
|
||