Closeness centrality: the closeness centrality, or closeness, of a vertex, is the average
length of the shortest path between the vertex and all other vertices in the graph [Bav50].
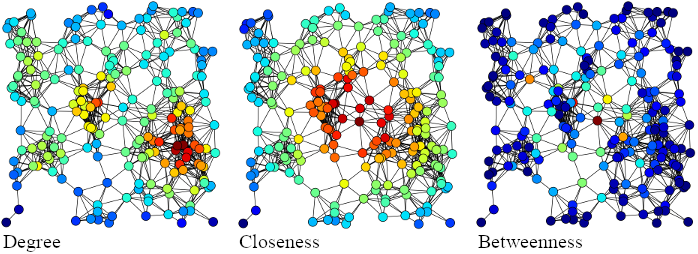
The more central is a vertex, the closer it is to all other vertices. The closeness centrality
characterizes the ability of a node to spread information over the graph.
Alex Balevas [Bav50] defined in 1950 the closeness centrality of a vertex as follows [Sab66]:

where d(y,x) is the shortest path between vertex y and vertex x.
Betweenness centrality: the betweenness centrality measures the number of times a vertex acts as a relay (router) along shortest paths between other vertices. Even if previous authors have intuitively described centrality as being based on betweenness, betweenness centrality was formally defined by Freeman in 1977 [Fre77].
The betweenness of a vertex x is defined as the sum, for each pair of vertices (s,t), of the number of shortest paths from s to t that pass through x, over the total number of shortest paths between vertices s and t,
It can be represented by the following formula [Bra01]:

where σst denotes the total number of shortest paths from vertex s to vertex t (with σss = 1 by convention), and σst(x) is the number of those shorter paths that pass through x.